義足をプログラムで動かす ~ロボット「toio」を通じ、多様な身体の使いかたを考える〜
"ちがい"とAIをクロスさせて問題解決の仕組みをつくるプロジェクトxDiversityで、ロボットトイ「toio」を使ったワークショップを実施
2021年7月11日、⽇本科学未来館 7F 未来館ホールにて、「一般社団法人xDiversity(クロス・ダイバーシティ)」がサポーターを対象としたワークショップを開催。ロボットトイ「toio(トイオ)」が、ワークショップ素材として採用されました。

xDiversityは、JST CREST(国立研究開発法人 科学技術振興機構)による研究プロジェクトとしてスタートし、AI技術の個人最適化技術と空間視聴触覚技術の統合を通して、人機一体による身体的・能力的困難の超克を目指すものです。一般社団法人はその活動のスピンオフであり、プロジェクトの持続可能性を担うために一般向けの普及活動をおこなっています。
このメンバーのひとりである、ソニーコンピュータサイエンス研究所の研究者、エンジニア・遠藤謙さんは、人間の身体能力の解析やロボット技術による下腿義足の開発に従事。マサチューセッツ工科大学D-labにて講師を勤め、途上国向けの義肢装具に関する講義の担当や、パラリンピック選手に向けた義足開発などもされています。
今回のワークショップは、自分ごと化しづらい「義足」について、手を動かしながら体感的に学ぶことが目的になります。そこで採用されたのが、紙工作がロボットになって動き出し、不思議な工作生物になるtoio専用タイトル「工作生物 ゲズンロイド(ピタゴラ装置などを手掛けるクリエイター・ユーフラテスによる企画)」の中から、"足の人"というプログラムのモチーフです。
難しい文字列を打ち込ます、視覚的にブロックを並べることで誰でも簡単にプログラミングができるビジュアルプログラミングアプリ「toio Do」と組み合わせながら、義足やロボティクスの大切な要素、そして多様な身体の使いかたについて、体感しながら理解し、学んでいきます。
どうすれば、
義足で速く走れる?
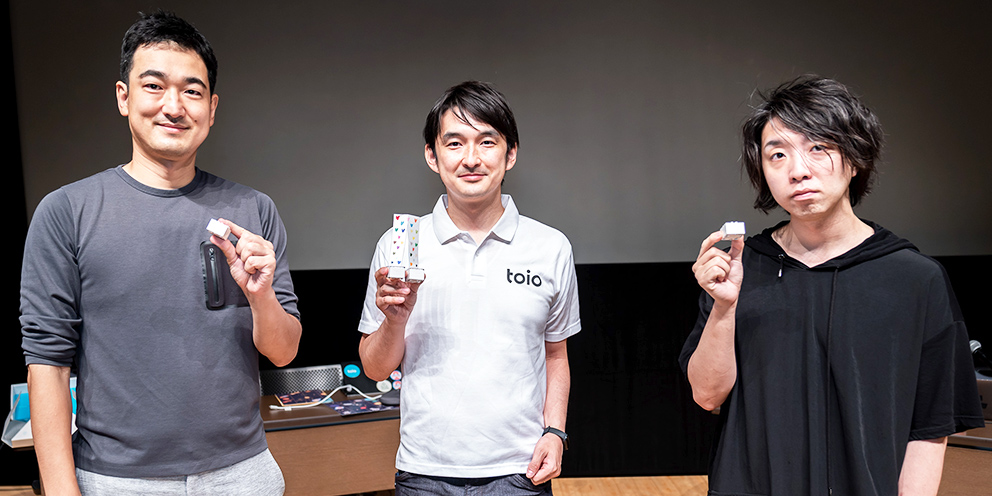
今回のワークショップの登壇者は、遠藤謙さんと、一般社団法人xDiversity代表理事で筑波大学 図書館情報メディア系准教授・デジタルネイチャー開発研究センター センター長の落合陽一さん、そしてtoio開発者である田中章愛(たなか あきちか)。
今回のワークショップでは、toioコア キューブ2台(以降キューブ)、専用マット、「toio Do」を動かすためのパソコン(持参)を使用。参加者の手元には、 "足の人"の型紙も配られました。
プログラミングをはじめる前に、遠藤さんからは実際にトップアスリートの走りかたを動画で見ながら「人は、"ピッチ"と"ストライド"を組み合わせて走る」という身体の仕組みについて、簡単な講義がおこなわれました。ピッチは1秒間に何歩進むかを、ストライドは1歩の長さ(距離)を示します。実は、これが今回のワークショップで、重要な要素になるのです。
ロボットを自分の手でつくって、動かしてみる

ワークショップはここからが本番! 「toio Do」のWebサイトから必要なアプリケーションをインストールしたら、キューブの電源を入れ、今回使用する特別なサンプルプログラムをダウンロードします。そして、型紙から "足の人"を切り出し、キューブ2台に片足ずつテープで貼り付けます。これらを専用マットの上に載せたら準備完了。サンプルプログラムを使って、2台のキューブを足のように交互に動してみます。
特殊なパターンが印刷された専用マットの「座標」をキューブが読み込むことで、プログラムで指定した距離の通りに、正確に動かすことができるのがtoioの特徴です。サンプルプログラムで"足の人"を動かし、自分なりに早く走れるように改造してみると、だんだんチグハグな動きになってしまう参加者も。ここで、遠藤さんに教えてもらったピッチとストライドの考え方が役立ちます。
「toio Do」は、アプリ上で必要なブロックを選び、時間指定「"前"に速さ"30"で、"0.2"秒動かす」、歩幅指定「"前"に速さ"70"で、"20"歩動かす」など、細かい設定が簡単におこなえます。
どうすれば、きれいなフォームでスムーズに走らせることができるのか。参加者はそれぞれサンプルプログラムをベースにして、何度も調整を繰り返します。スムーズに走るようになったら、今度はより速く走るためのプログラミングを組むのに挑戦。toioは指定通り、繰り返し正確に動くため、自分で組んだプログラミングをその場で確認して調整......といった試行錯誤が、スピーディーに繰り返せます。
toioのこうした点に関して、落合さんは「試行錯誤しやすい」「常時接続で、タイムラグがないところがいい」とコメントされていました。

"足の人"が動かせるようになったら、次に片足を義足に模した硬い厚紙素材に変えることで"足の人・義足バージョン"にトライ! 片足が異なる素材に変わった途端、先ほどまでの設定ではうまく走らず、足が絡まってしまいます。これは、左右対称ではない義足の制約を体験するための工夫。
「"足の人"のマテリアルを変えたら動かし方が変わるところが、義足的でよかったですね」(落合さん)
このような実験や体験の後、質疑では「普段意識しない足の使いかたや、義足による制約を体感的に理解できた」といった参加者のコメントがありました。

ワークショップのフィナーレには、参加者数人が壇上に上がり、自分で組んだ"足の人"を走らせ、速さを競う場面も。はじめて触ったとは思えないほど、高速でスムーズな走りを披露する方もいて、会場全体が沸きました。
遊びの延長で、プログラミングや
ダイバーシティ(多様性)について学ぶ
2020年春から小学校でのプログラミング教育が必修化するなど、子どもはもちろん、いまや年齢を問わずプログラミングに対する興味関心が高まりつつあります。そうした中で、toioはどんな役割を担えるのでしょう?
今回、プログラミングのスキル問わず、全員が同じ条件のtoioを使用したことについて、開発者である田中は「toioは同じ動きを繰り返せるので、ちょっとした条件の変化を比較しやすく、他の人のプログラムも参考にできる。その結果、どういうふうにロボットを動かしたいのかというイメージや、(足の)パーツが変わったときに材料や動きの特性を観察するという本質的な姿勢に集中することが大事になってくると思う」と話しました。また、「みんなで同じ問題に取り組んだほうが多様な視点が生まれやすく、よりよい答えが出てくる」とも語りました。
簡単な操作性とアイデア次第で、思いもよらない使い方ができるtoioは、自作ゲームや音楽を奏でるといった遊びの要素はもちろん、今回のように「人はどうやって走るのか」「義足では足の動きはどう変化するのか」「義足の素材が変わると、走り方に変化が出るのか」などのちょっとした条件の差異による影響や、なかなか日常では自分ごと化しづらいダイバーシティの本質について理解し、学ぶためのツールとしても活用いただける可能性があります。
遠藤さんは、「パラリンピック選手の試合を見ていると、通常のランナーの走りとなんら変わりなく、"義足で歩くことも、走ることも簡単にできる"ように感じてしまいます。でも、彼らはトレーニングをして、努力をして、あそこまでたどり着いているんです。その過程を無視して語られてしまうことが多いので、その試行錯誤をtoioで体験してもらえたら」と、今回のワークショップで伝えたかったメッセージを説明。義足で歩くことの難しさや、身体の使いかたを考えることについて、プログラミングやロボットから感じてほしいのだと話されていました。
大人だけでなく、これからを担う子どもたちにもソーシャルイシューに関心を持ってもらうことは、なかなか難しいもの。押し付けではなく、遊びながら自主的に取り組める体験の素材としても、toioは活躍しそうです。
toioの魅力は「トライ・アンド・エラー」のスピード感

落合さんはtoioのようなロボットを含め「トライ・アンド・エラーの速さが、デジタルツールのおもしろさ」なのだとコメントされました。
「例えば、義足をつくるワークショップで3Dプリンターを使ったとして、パーツができ上がるのに5時間かかることになったら、子どもたちは飽きてしまう。それに比べて、toioのようにシンプルなインターフェイスで、ボタンを押してすぐに動かせれば、子どもも飽きませんよね。トライ・アンド・エラーの速度を上げるにはデジタルが向いているんです。だけど、粘土を使いたいシーンでは、別に粘土でもいいんですよ。じゃあtoioの何がいいかといえば、"速度の速さと、手先の器用さが影響しない"ことです」(落合さん)
また、遠藤さんは「ハードウェアを用いたワークショップでは、往々にして課題に取り組む以前の"セットアップに時間がかかりすぎること"が障壁となり、本当にやりたかったワークショップの主題になかなかたどり着けないこともあった。その点toioは操作が簡単で、本質的な内容に到達しやすかった」とも、話してくださいました。
「今日も接続でちょっと手間取ったくらいのことはあったものの、全員が義足ロボットを動かす段階までたどり着けたことは大きいですね。toioは、考えなくてもいいところは考えなくていい、ムダなところは飛ばせる簡単さがある。あと、充電の持ち時間が長かったり、壊れにくいのも魅力ですね」(遠藤さん)
とは言え、遠藤さんがおっしゃるように設定の段階で多少、参加者の進み具合にバラつきが出たのも事実。これは、授業や、家庭で子どもと遊ぶ際にも気になるところです。
落合さんからは「パソコンと接続するといった"儀式的"なことって、デジタルツールには意外と多いので、それは親がやればいい」とアドバイス。toioの設定は一般のデジタル機器に比べても決して複雑ではないので、表示される説明通りに進めば、大人なら簡単におこなえます。すべてを子どもだけでやり遂げず、大人も無理なく参加すればいいんですね。
プログラミング自体も、「toio Do」はビジュアルプログラミング方式なので、子どもと「このブロックで、こんな設定をしたらどんな動きをするかな?」と一緒に考えながらおこなえるのが特長。実際、ワークショップに参加した親子が、共にプログラミングを楽しんでいる姿が印象的でした。
最後に、今回のワークショップの目的であった「義足ロボットを走らせる」以外に、toioでどんなことをやってみたいか、落合さんにうかがいました。
「これを機に、子ども用のおもちゃを自作する人がいっぱい出てきてくれるといいなと思います。プログラムを読み書きできる電子工作用のインターフェイスデバイスで、かつ無線接続で便利なものは、世の中にそこそこ出てきています。だけど、その中でもアクチュエーター(モーターなど力や速度・角度などを自由に制御できる装置)が付いているのが、toioは非常にいいですね。個人的には、猫のためのおもちゃを自作してみたいです」(落合さん)

今回、ワークショップの原案にもなったtoioの「工作生物 ゲズンロイド」は、"足の人"以外にも"めだま生物""シャクトリー"など、いろいろな工作生物を紙工作とロボットでつくることができます。手を使ってつくった工作が動き出すのは、子どもにとってもプログラミングに興味を持つきっかけになるかもしれません。